

[汽车之家新鲜技术解读] 最近我们体验了威马的“公共停车场无人免学习代客泊车”技术,开篇之前不要被它冗长的名字吓到了,简而言之,它就是一个可以在特定区域(比如商场)让车主直接下车去逛街,而他的爱车可以自己找个地方停好再等车主召唤的技术。虽然现阶段看来这个技术还有不少局限性,在实际操作环节也还有许多客观问题有待解决,但它或许也代表了未来的用车方式,接下来我们就带大家简单地了解一下。


要说现在城市用车的痛点在哪,我想周末的购物广场找停车位绝对要算一个了。而用户的痛点则能让车企们催生出不少新鲜的玩意儿,这一技术就非常有代表性。

说到“自动泊车”目前这一技术和自动驾驶一样也可以分为几个阶段,一是现在大规模搭载在中高配车型上的需要驾驶员参与控制的泊车版本,这个版本的自动泊车需要操作人员还在车辆的控制回路之中,并在必要的时候接管车辆。它的用途是降低泊车时的难度,有了这一配置在侧方位停车不太容易掌握车身和周围距离的时候驾驶者就可以很轻松地完成一次标准停车了。而再此基础上更进一步则是驾驶者在车外的遥控自动泊车了,驾驶者还是需要在车辆附近充当计算和控制中枢的作用,对车辆下达指令。它的好处则是可以在一些狭窄的车位泊车,避免了从副驾或是天窗后备厢位置爬出来的尴尬局面。其实就目前的停车场环境而言,驾驶员可以直接控制和接管的自动或遥控泊车方式是最为稳妥的。

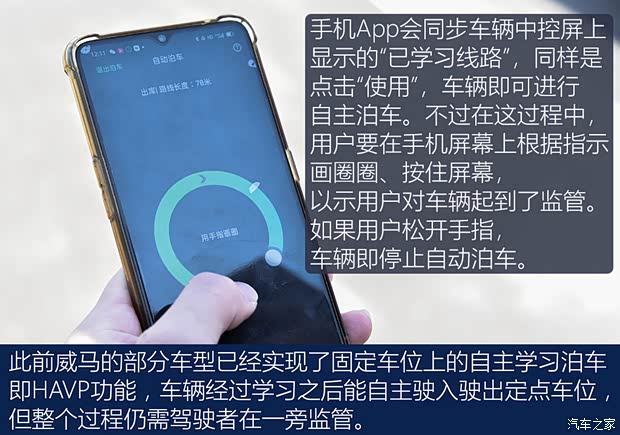
随着技术的发展,真正无人版本的自动泊车也开始出现在一些量产车型之上,例如威马的HAVP功能可以实现车辆自主行驶躲过障碍物,并停在驾驶者指定位置的功能。不过该功能对场地有一定要求,比如威马的HAVP功能在实际体验的过程中就还需要经过在现场进一段时间的行学习之后才能使用。这一功能的实现是靠车辆搭载的高性能计算机和遍布于车身的摄像头和传感器以及智能算法实现的,到这一步,驾驶者已经可以部分从停车这件事上解放出来了。

而在此基础上更深地挖掘车辆潜能的话,其实具备自主学习泊车功能的车型也可以在特定的场所完成无人自主泊车以及召唤功能。简单来说就是通过车辆和场地地图的适配,让车辆在部分有高精度地图覆盖的区域具备完全无人驾驶的能力。不过这种无人驾驶要求的车速更低,路况相对也没有城市交通那么复杂,因此也更好实现一些。
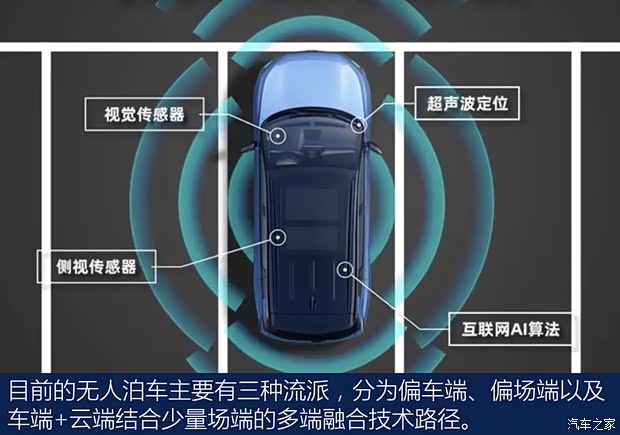
从目前的停车场无人泊车的技术发展路径来看,主要有三种流派,按技术和设备的侧重点不同大致可以分为:偏车端、偏场端以及车端+云端结合少量场端布置的融合方案。现在看来这几种方案各有优劣,接下来就简单和大家进行一些介绍。
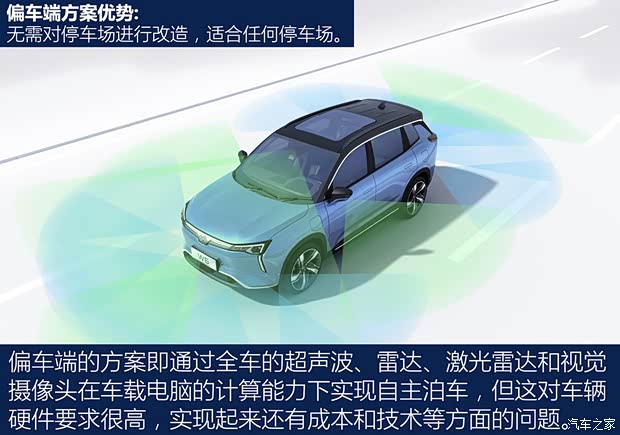
首先是偏车端的无人自主泊车方案,顾名思义就是将无人泊车这个行为的主要道路探测、场景以及路径计算放在车上。通过车辆自己解决地图绘制、路径规划的一种技术路径。目前特斯拉的Smart Summon(智能召唤)就是典型。通过特斯拉车主在停车过程中使用Smart Summon功能,可以将所在停车场进行地图绘制,并且上传云端,样本数据量大了之后智能召唤功能也会更好用。而在国内,小鹏汽车也是走的类似的技术路径,将车辆武装起来,通过深度学习和相应算法匹配可以生成高精度地图供泊车使用。这种偏车端的无人泊车方案的好处在于它不依赖特定停车场的设施和配置,只要车辆经过学习之后就能实现无人自主泊车和召唤。相应地这个功能的实现对车辆硬件也提出了更高的要求,同时在算法和软件以及成本方面也有更高的要求。
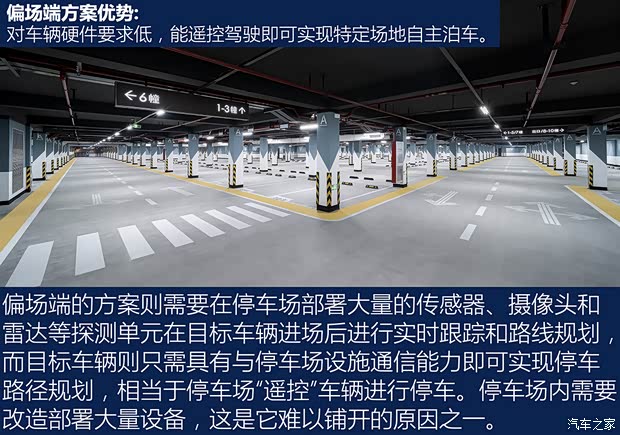
与之相对的方式就是偏场端的方案,在这一方案中,将感知车辆位置、行进路径的传感器部署在停车场中。车辆只需具备与停车场设施的V2X车联网通信功能以及可控的底盘执行系统就可以在停车场控制中心的实时反馈下完成无人自主泊车。这个方案对车辆的智能化和计算能力没有很高的要求,看似对车辆硬件要求很低,但却也是比较难以实现的。这是因为这一技术路径需要在停车场增加各种设备,进行大量改造,实现起来也比较难。
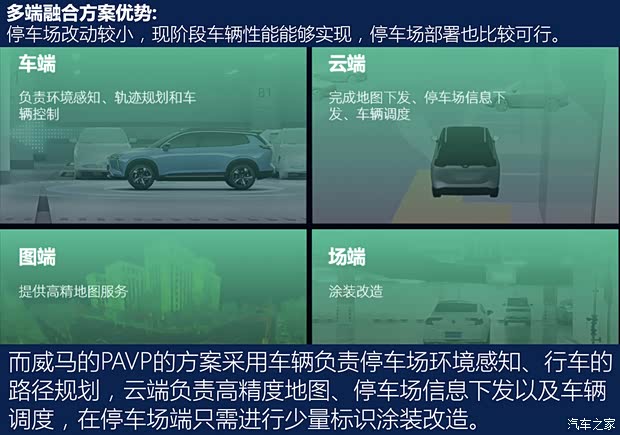
全往车上铺单车成本高,车主不喜欢。往场地上堆设备的话,停车场难协调。那怎么才能在现有技术条件下完成无人自主泊车呢?技术人员想到了将上面两种技术融合的方案,新方案要求车端有一定的自动驾驶计算能力以及配置,但又没有高到必须装上几个激光雷达再配上超高性能的车机和算法。在停车场的场地上也不需要安置一堆传感器,只需要在特定的几个位置装上车辆用于视觉识别的标识就可以了。剩下的事情交给云端的控制中心在车辆入场前将提前绘制好的停车场高精度地图和停车场信息下发给车辆就好了,这时候车辆可以根据地图和车载传感器在现场进行路径规划,然后自己开过去停好并等待车主的召唤。

这次我们体验的威马W6就采用的这种方案,在停车场只需要进行少量可供车辆摄像头进行视觉识别定为的标识和对应车位的遥控锁具就能完成改造,更适合现阶段的快速部署所需。而且同小鹏的无人自主泊车方案一样,它也支持跨层停车。遇到障碍物或行人时,会主动停车/避让。无法通行时,则可联系地勤处理。靠近可用停车场时就会自动下载路径信息,自动泊车路线由高精度地图和定位实时修正,没有泊车和停车点的距离限制。
写在最后:
虽然车端+云端+场端的多端融合方案在现阶段可以迅速实现特定场景下的无人自主泊车,也是当下无人自主泊车的可行方式。但在体验中我们还是能发现一些问题有待解决的:比如若是在车流、人流量很大的周末,自主泊车很可能会受到现场不可控因素的干扰导致无人自主泊车的成功率下降。
这时候不论是通过车主自己解决还是场地上的地面服务人员来解决问题都不是效率最高的方案,毕竟在人工智能还不能完美替代人类操作机器的当下最优解还是人类本身。受限于停车场数量、停车场内环境复杂程度以及可用车位数量,这个技术在目前看来可能还停留在宣示技术实力的层面比较多,对车主日常用车的助力还不是很大,不过这种公共停车场无人免学习代客泊车背后的技术还是未来可期的。(文/汽车之家 罗奥雨)
京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn