

[汽车之家 新鲜技术解读] 2021年10月23日,首届广汽本田安全中国行•第二届道路安全创新大赛在广州展开。行业专家、媒体以及12个高校代表队参加了这次大赛,以多维度视角来讨论移动互联网时代道路交通安全问题的解决之道。


吉林大学-万丈高楼平地起团队、吉林大学-灯杆小队(左&中)、哈尔滨工业大学(威海)-模数师队(右),共3支参赛队伍荣获一等奖。下面我们就一起来了解下本次参赛的12个队伍带来的作品,看看他们的设计是如何提升道路交通安全的。

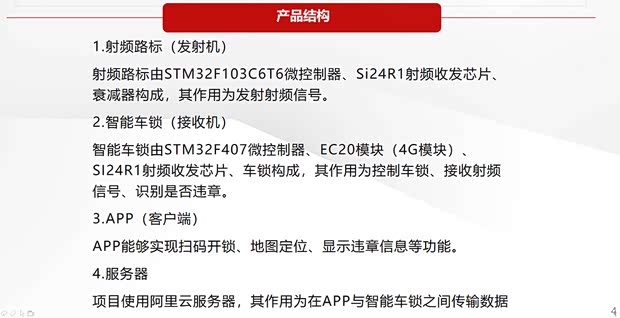
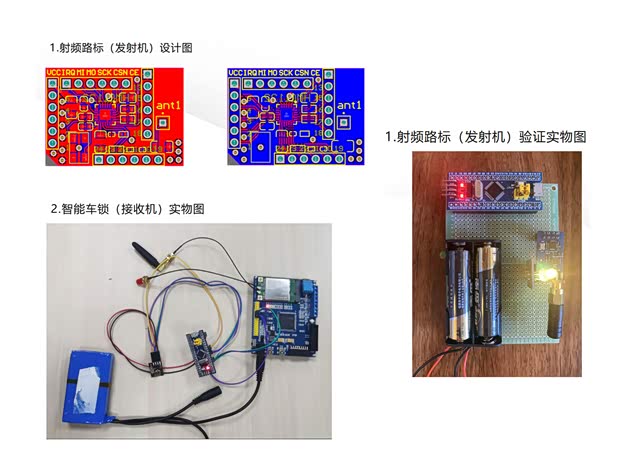
来自哈尔滨工业大学(威海)的模数师团队部设计了“射频路标及智能电动车锁”。通过在共享电动自行车锁内安装低成本射频接收器,在路口信号灯柱内安装射频发射器,实现对电动车是否超速或是否违反交通灯号进行检测。检测到的数据会通过无线网络上传至服务器,可为交警部门和共享车辆平台提供违章处罚依据。该方案已经进入到实际测试阶段,低成本的特点有利于其得到快速推广。


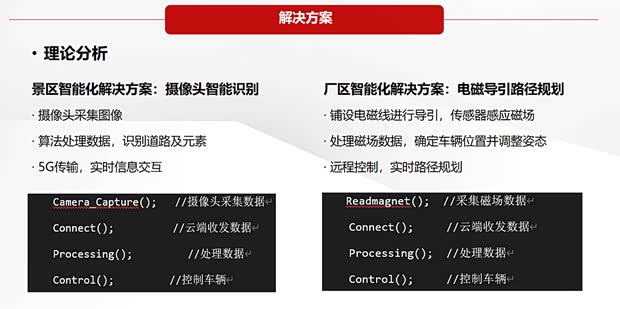
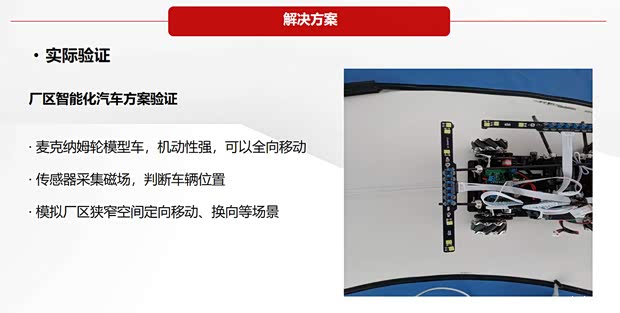

哈尔滨工业大学(威海)的汽智卓越队设计了特定道路使用的自动驾驶车辆。这些车辆包括利用摄像头进行环境识别的景区自动驾驶车辆以及利用电磁引导路径规划的厂区自动驾驶车辆。该项目的理念已经在小型模型车上得到初步验证。不过技术要应用在实际道路上还需进一步在技术上进行打磨和完善。

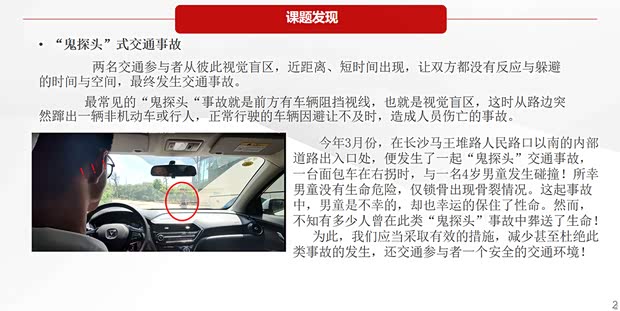
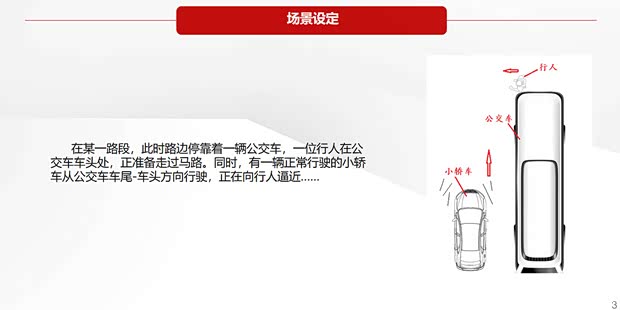
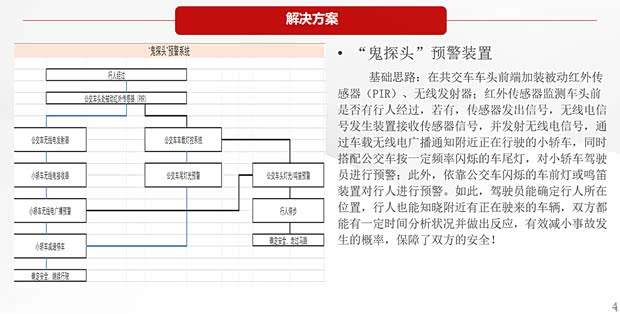
由于公交车车身较高,所以行人从静止公交车车头横穿时就会创造出一个鬼探头的情况。湖南大学的苏队设计的是一个安装在公交车上的鬼探头预警装置。这个装置在公交车头安装被动红外线传感器来检测前方的行人。如果有行人从车前经过,公交车会闪烁前大灯或者鸣笛来对行人进行警示,通过闪烁尾灯来警示后方来车,同时会通过无线电广播通知附近行驶车辆,进行联动报警提醒。该方案目前处于概念阶段,但简单实用的系统设计和低廉的成本将有利于其推广。

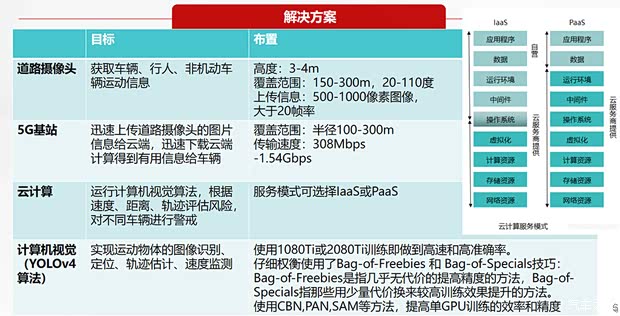

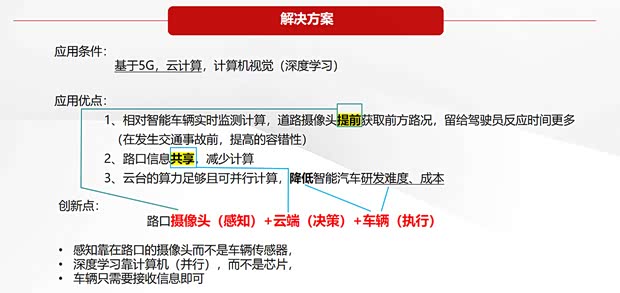
湖南大学咸鱼队的理念是在十字路口布置摄像头系统来捕捉路口实时交通情况,通过5G低时延网络传送到云端服务器进行图像识别、目标定位、轨迹估计以及速度检测等。决策结果会回传到车辆提醒驾驶员避让两轮车和行人。目前该项目处于概念阶段,不过整体思路与目前业内主流的V2X理念相一致。

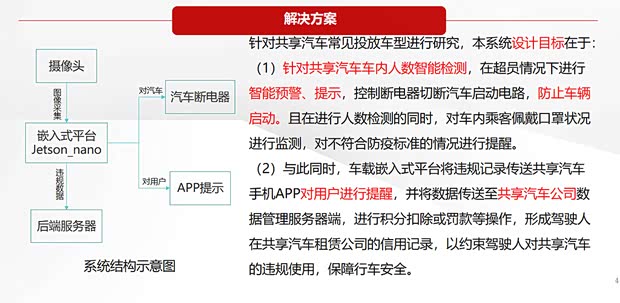
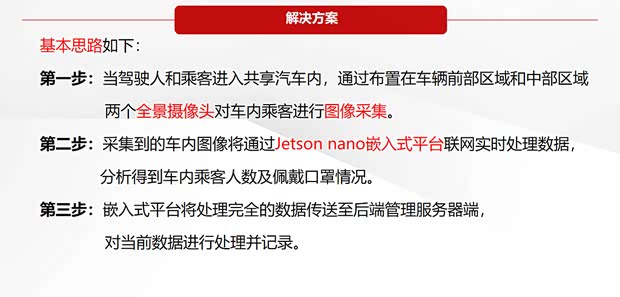

吉林大学万丈高楼平地起团队设计了一套共享汽车超载检测系统。该系统的思路是通过摄像头获取车内影像,利用神经网络算法来识别车内人员数量,在在超员情况下进行智能预警、提示,防止车辆启动。超载违规记录会共享到服务器,通过手机APP提醒用户,同时共享汽车公司根据违规数据对用户积分进行扣除或罚款等操作,以促进驾驶人规范用车,保障出行安全。该系统利用了英伟达主流的Jetson Nano硬件平台,搭配最新的YOLO V5算法,项目已进入测试阶段。

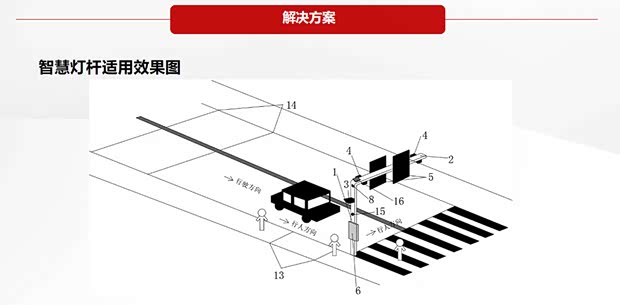

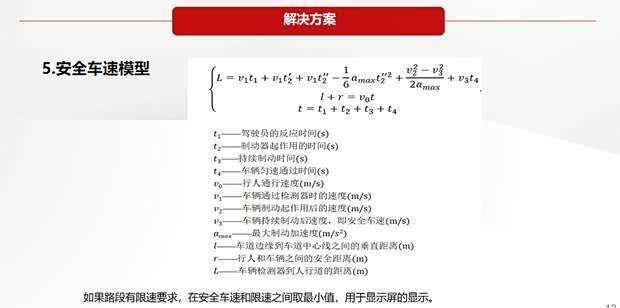
吉林大学灯杆小队设计了一个智慧灯杆,灯杆上带有摄像头、显示屏、控制器以及微处理器。通过摄像头获取无信号灯交叉口行人与车辆的影像,计算行人和车辆碰撞的概率,概率超过阈值会在智慧灯杆显示屏幕上显示警示信号,提醒驾驶员减速或者注意。该项目推导出了一个避免车辆与过街行人发生碰撞的安全车速模型。目前该项目已完成理论验证。

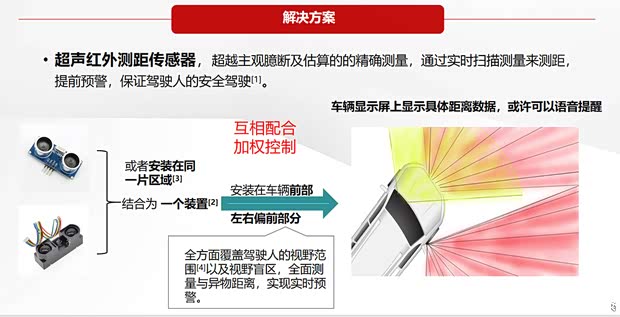
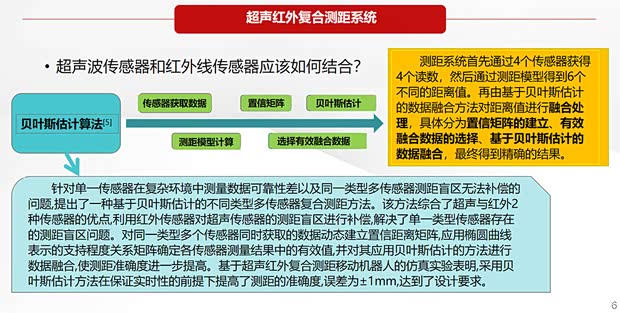

天津大学巧夺天工队利用超声波传感器和红外线传感器进行融合,缩小测距盲区,辅助驾驶员识别视野盲区的情况。该项目的理念是在车头和车侧均设置上述传感器来进行盲区监测。算法上采用了贝叶斯估计算法来获得精确结果,利用BP神经网络来实现温度补偿。该项目处于概念阶段,在对环境依赖性上相比360度全景影像系统更好,成本比激光雷达更低。

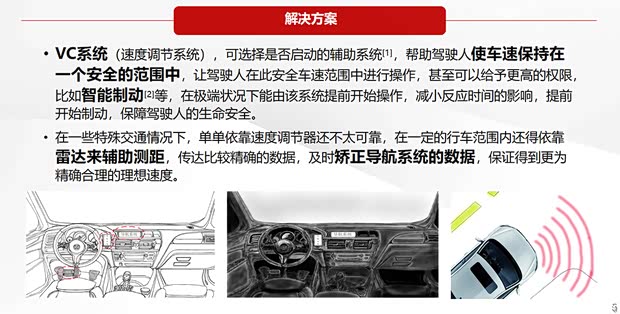
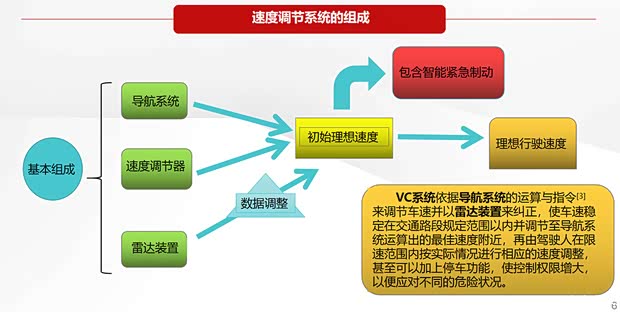
天津大学必胜队设计了一个车速调节系统,将车速稳定在交通路段规定范围以内并调节至导航系统运算出的最佳速度附近。该系统包括速度调节器、改进的导航系统以及激光雷达。该系统目前处于概念阶段。实际上同样的功能已经在一些目前主流的L2级别驾驶辅助系统上出现了。

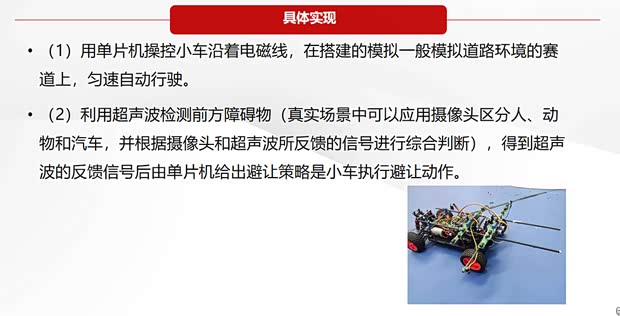

同济大学逮虾虎队设计了一款超声波探测的自动避障车辆。该车辆利用超声波检测前方障碍物然后进行避让。该项目在小型电磁寻迹模型车上进行了测试,小车能够避开障碍物,然后自动寻找新的路径。该项目后续还会引入摄像头来区分障碍物类型,判断障碍物位置,然后再与超声波传感器的数据进行融合。该设计要实现真实车辆的自动避障操作可能有些难度,但用来实现盲区预警可能会比较现实。

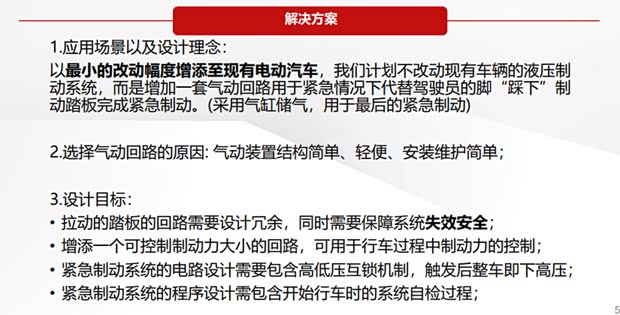
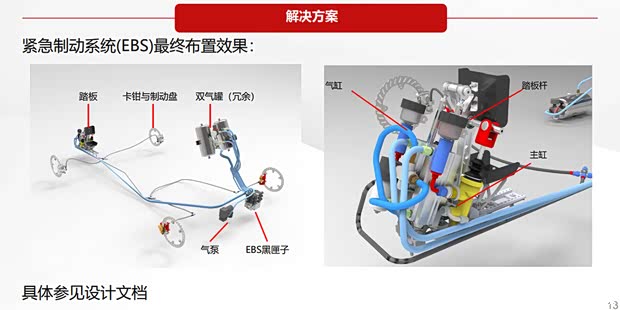
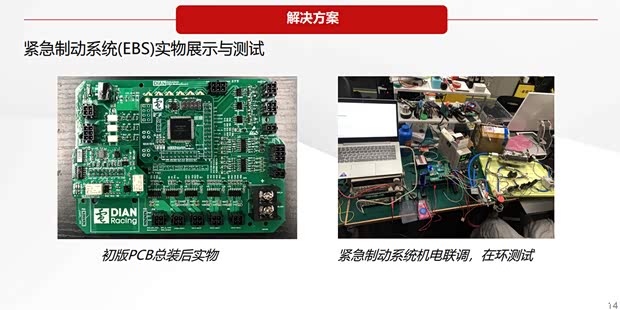

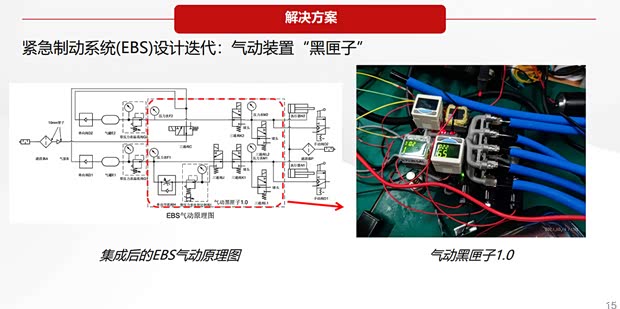
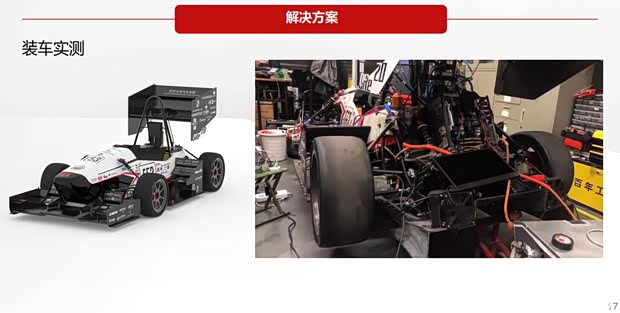
同济大学DIAN Driverless线控制动小组设计了一套带有冗余机制的紧急制动系统。这套系统在最小化原电动车改动的情况下,为车辆增加了一套气动制动装置。该系统制动装置在车辆发生事故触发高压自动断电保护时,能够控制气动系统代替驾驶员踩下制动踏板完成紧急制动。该项目已经完成基础软硬件设计并已经安装到FSEC赛车上进行测试。整套系统无论在机械部件设计、电子电路设计以及控制软件设计上都是可圈可点的,充分展现出同济大学在汽车学术领域的造诣。




武汉理工大学的明天争取不熬夜队设计了一个基于驾驶行为习惯及车况数据采集的一体化驾驶安全监控平台。对收集到的车辆运行状态数据以及驾驶人员驾驶行为进行大数据分析,可以避免因车辆存在故障隐患、驾驶员有不良驾驶习惯等而引起的交通事故,同时也可以实现实时报警、实时救援等功能,减轻交通事故造成的伤害。实际上,相同概念的产品目前在手机导航上已经有出现。当你使用手机导航完成一次导航后,软件会给你一个评分,这实际上就是大数据分析的结果。



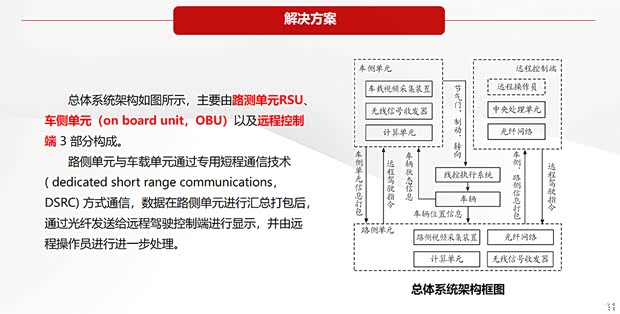

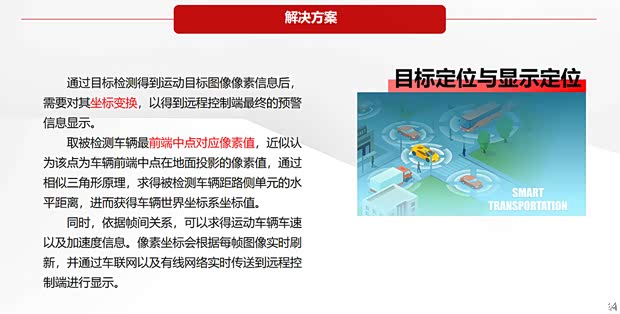
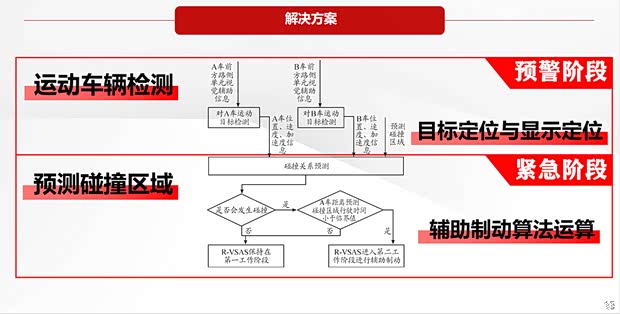
武汉理工大学的武理WUT团队设计了一个基于路侧单元视觉辅助的安全预警和智能制动系统。这套系统主要是为自动驾驶车辆的远程安全员而设计的。其背景是,未来自动驾驶车辆数量增加,为每一辆自动驾驶车辆配一个安全员成本太高。一人管多车的远程安全员就应运而生。远程安全员通过VR设备来“帮助”需要紧急接管的自动驾驶车辆。该设计通过在路旁增加摄像头来获取路口的交通情况,当自动驾驶车辆四周存在较大视野盲区时,路侧单元的摄像头利用“上帝视觉”获取的数据能够实现盲区填补功能,这样远程驾驶员通过VR设备就能够实现看穿障碍物的视觉效果,从而有利于作出正确的控制决策。当然,该系统也能用于非自动驾驶车辆,同样能起到盲区预警的效果。该设计目前处于概念阶段,但想法还是非常有创新性的。

广汽本田一直致力于道路安全建设,承担企业的社会责任。2007年开展“安全中国行”活动、2019年建立广汽本田 •道路安全高校联盟、2020年和今年的道路安全创新大赛都体现了广汽本田对推广道路安全理念的坚持。本届道路安全创新大赛的不少作品有着非常好的创新性和实用性。这些作品中除了拥有优秀的机械、电子、程序设计方案外,还深度融合了5G网络、人工智能、图像识别、VR等前沿技术,充分展现了我国新一代大学生在科研上的眼界、创新与能力。产学研合作的深化将为未来中国汽车产业注入了新的活力。(图/文/汽车之家 常庆林)
京ICP备09113703号-1
信息网络传播视听节目许可证: 0110553
广播电视节目制作经营许可证
公司名称:北京车之家信息技术有限公司
中央网信办违法和不良信息举报中心
违法和不良信息举报电话:400-868-5856
举报邮箱:jubao@autohome.com.cn