◆ 威麟X5实际越野性能测试
上面全都是理论分析,威麟X5的越野性能到底如何还要通过实际测试来验证。不过经过上面的一通分析,我们对它的期望值已经不抱太高了。

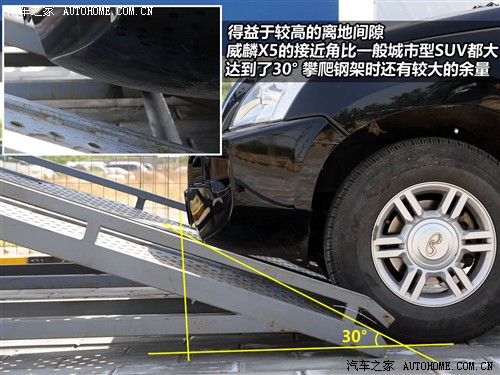
首先来个最简单的――同轴打滑测试,两个滑轮组位于同轴上,只会造成前轴或者后轴打滑。不过首先要肯定的是,威麟X5的接近角表现不错达到了30度,而一般城市型SUV都只有25度左右。


在切换到4WD高速四驱模式后,威麟X5开始挑战项目1。因为是通过分动箱内部硬连接实现的四轮驱动,所以前后轴之间不可能出现转速差,因此当前轮压上滑轮组时并没有出现足以引起注意的打滑现象,凭借着两个后轮分配到的50%的动力,威麟X5很顺利的攀爬上铁架完成了项目1。

项目2的难度要明显增加很多,两个滑轮组分别位于前轴和后轴上。车辆不但要面对爬坡的阻碍,还要想办法克服交叉轴。

其实项目2的挑战失败是我们意料之中的事情。由于缺乏有效的措施来抑制轮间打滑,威麟X5的全部动力都通过前后两个狂转的车轮浪费掉了。即使换上4L低速四驱模式也无济于事,现在和扭矩的大小并无太大关系,关键是它有劲却使不上。

既然高难度的交叉轴项目无法完成,我们来试一个难度较低的交叉轴项目――驼峰障碍。虽然车辆也会面临前后同时有一个车轮出现低附着力的现象,但如果悬挂行程够长或者车重前后比例差异较大的话,还是有可能通过的。
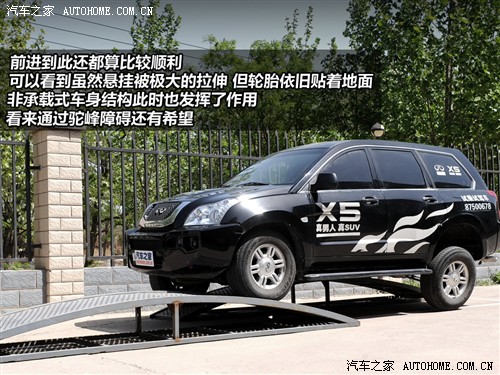


虽然我们抱有一丝期望,但威麟X5还是受阻于驼峰障碍之前。可以看出非承载式车身和整体桥式悬挂发挥了作用,尽管同轴的两个车轮位于差异很大的高度上,但车身基本还是与地面平行的,而不是像有些承载式车身结构的SUV那样前仰后合的。但还是因为无法抑制轮间打滑,当交叉轴现象彻底形成时,威麟X5就无法再前进一步,不管是从左边还是右边、4WD还是4L,结果都是一样。